Запуск шагового двигателя

Управление шаговым двигателем NEMA17 с помощью Arduino
Двигатели постоянного тока ДПТ с постоянными магнитами начинают работать сразу, как только к якорной обмотке будет приложено постоянное напряжение. Переключение направления тока через обмотки ротора осуществляется механическим коммутатором — коллектором. Постоянные магниты при этом расположены на статоре.







 на прерываниях таймера | Амперка / Форум")

![[GX developer] Запуск шагового двигателя из программы](http://rfanat.ru/s19/upr_step-2.png "Как крутить шаговый двигатель с помощью Blink / Хабр")
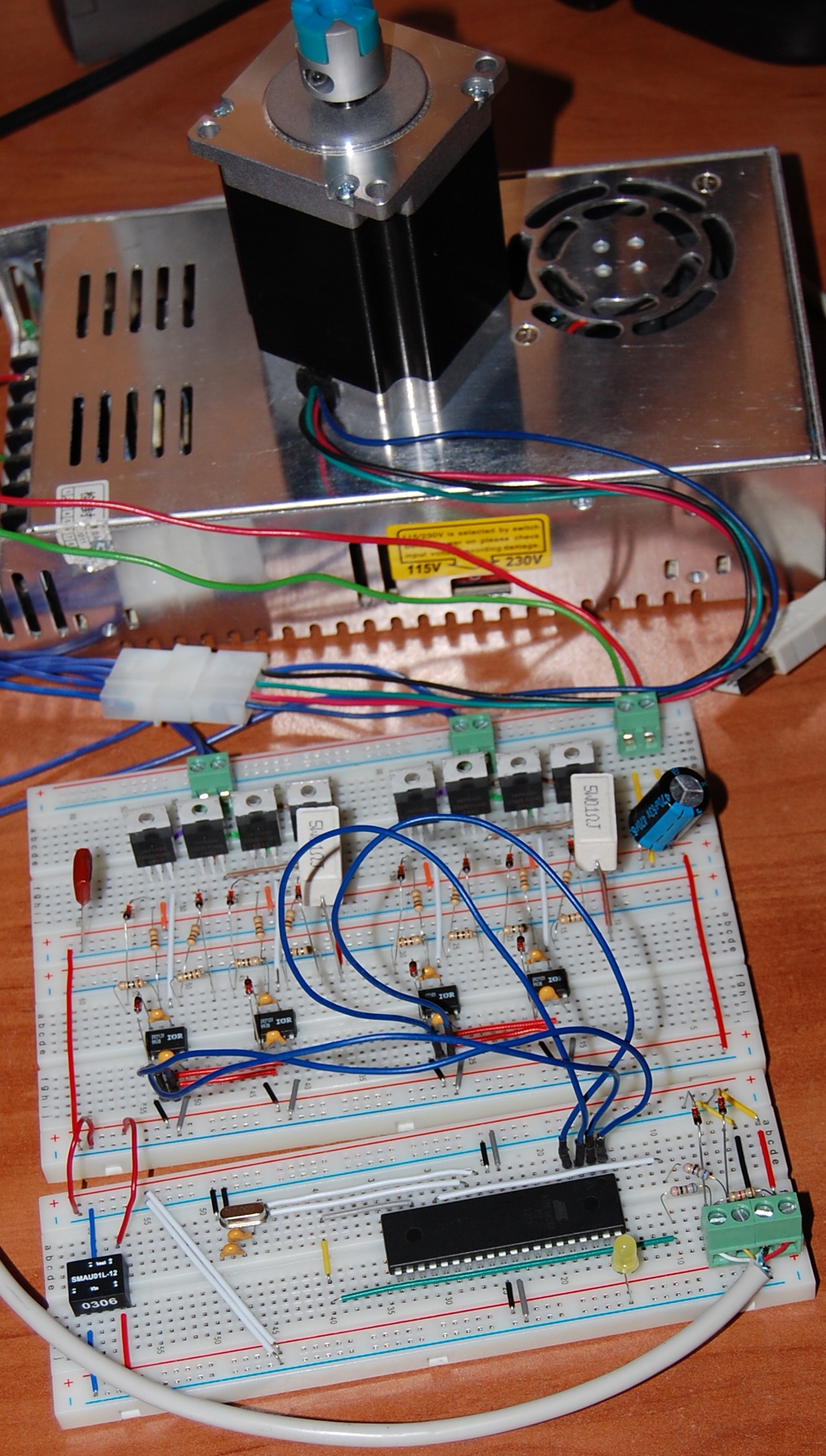
Как-то раз мне захотелось поэксперементировать с шаговыми двигателями. А вот с биполярным двигателем всё гораздо сложнее. Он имеет минимум две обмотки, на каждом конце которых полярность питания должна меняться на противоположную.

 | РобоТехника18")







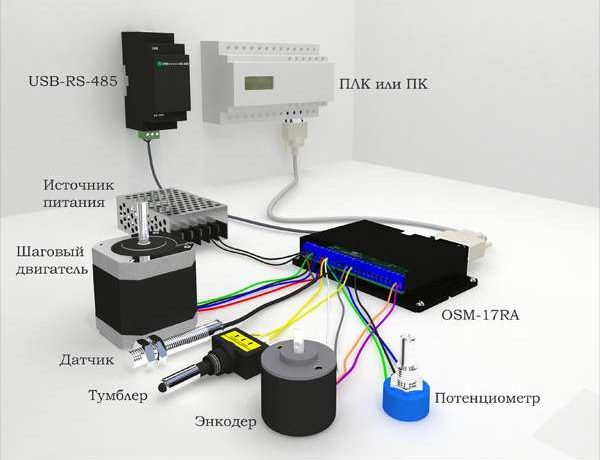
Шаговый двигатель stepper motor предназначен для точного позиционирования или перемещения объекта на заданное количество шагов вала. Плата Arduino может управлять шаговым двигателем с помощью драйвера и библиотеки stepper. В зависимости от конструкции, сегодня применяются три вида шаговых двигателей: с постоянным магнитом, с переменным магнитным сопротивлением и гибридные двигатели. Подсчитав количество сделанных шагов, можно определить точный угол поворота ротора. Таким образом, шаговый двигатель является сегодня идеальным приводом в 3D принтерах, станках с ЧПУ и в другом промышленном оборудовании. Это лишь краткий обзор устройства и принципа работы stepper motor, нас больше интересует, как осуществляется управление шаговым двигателем с помощью Ардуино.